
Bild: DMB / Eric Lichtenscheidt www.feinefotos.de | Eric Alexander Lichtenscheidt
RoboMob - Robotik und Mobilität
Leitexponat in diesem Erlebnisraum ist der Forschungsroboter »RHINO« der Universität Bonn aus den 1990er Jahren, der wesentliche Grundlagen für die Entwicklung des autonomen Fahrens legte. Folgerichtig ist ein futuristischer Fahrsimulator eine weitere Hauptattraktion, der die technischen Grundlagen und Rahmenbedingungen des Einsatzes von KI beim autonomen Fahren erlebbar macht. Wie KI-Systeme beim autonomen Fahren sicher Verkehrsschilder erkennen oder Bewegungsprognosen von Fußgängern erstellen können, kann ebenso aktiv erlebt werden, wie das Zusammenarbeiten von KI-gesteuerten Industrierobotern mit realen Menschen.
Bild: Deutsches Museum | Eric Lichtenscheidt
Das besondere Objekt: Roboter RHINO
RHINO ist ein Stück Wissenschaftsgeschichte, das eng mit dem Deutschen Museum Bonn verbunden ist. Im Mai 1997 führte der tonnenförmige Roboter Besucherinnen und Besucher zu elf ausgewählten Ausstellungsstücken der damaligen Dauerausstellung und erläuterte sie. Damit er dabei auch freundlich aussah, erhielt er ein »Gesicht«. Der Clou dabei war, dass RHINO sich selbständig im Museum bewegen konnte. Mit einer Vielzahl von Sensoren erstellte er ständig eine aktuelle Navigationskarte seiner Umgebung. So konnte er auch plötzlich auftauchenden Hindernissen wie hin- und herlaufenden Besucherinnen und Besuchern rasch und zuverlässig ausweichen. Ein wichtiger Baustein für den Erfolg von RHINO war der Einsatz von Techniken der Künstlichen Intelligenz (KI) wie maschinellem Lernen oder auch künstlicher neuronaler Netze und deren Zusammenspiel mit den Sensoren.
RHINO basiert auf einem Roboter der amerikanischen Firma »Real World Interface«. Ein Team von Informatikern und KI-Forscher der Universität Bonn entwickelte die gesamten Steuerungsprogramme.
Mit den mit RHINO gemachten Erfahrungen konnten einige Mitglieder der Bonner Forschergruppe 2005 die »DARPA Grand Challenge« des amerikanischen Verteidigungsministeriums, einen Wettbewerb für autonom navigierende Fahrzeuge, mit einem unbemannten VW Touareg gewinnen: ein Meilenstein auf dem Weg zum autonomem Fahren.
Inv. Nr. 2018-0446

Bild: Deutsches Museum | Eric Alexander Lichtenscheidt
VR RHINO
Da der historische RHINO leider nicht mehr mobil gemacht werden kann wurde im Rahmen einer Masterarbeit an der Universität Bonn RHINO wieder zum Leben erweckt. Die machte ein Team um Erik Schlachhoff und Nils Dengler mit virtueller Realität möglich. Die Anwendung in der VR-Brille zeigt, wie RHINO 1997 autonom durch das Museum gefahren ist. BesucherInnen können die VR-Brille aufsetzen um RHINOs Navigationskünste selbst zu erleben.
RHINO im Film
Unser Museotainer erklärt im Rahmen eines KI:ckstarts den RHINO.
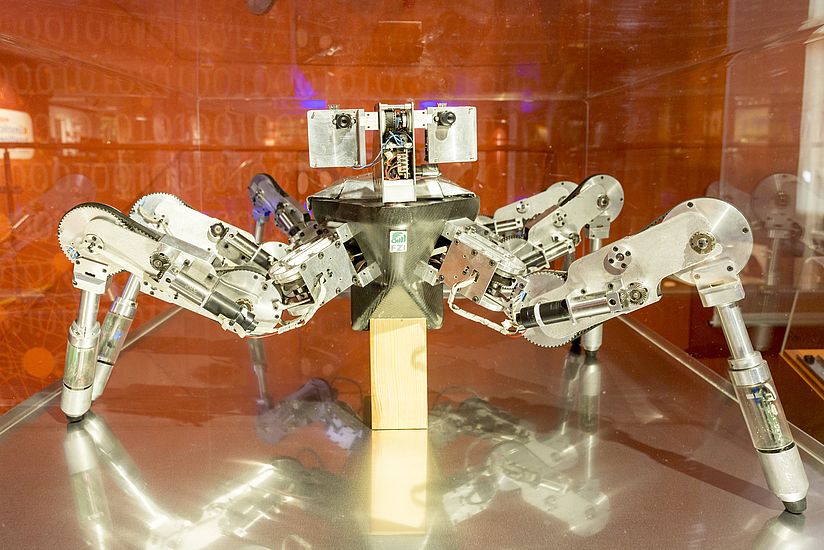
Bild: Deutsches Museum | Eric Alexander Lichtenscheidt
LAURON – der sechsbeinige »LAUfender ROboter Neuronal gesteuert«
Entwickelt wurde die Laufroboterserie LAURON seit 1992 am FZI Forschungszentrum Informatik in Karlsruhe. Die Roboter sollten sich selbständig in unwegsamen Gelände bewegen können. Die indische Stabschrecke mit ihren sechs Beinen diente als biologisches Vorbild. Um deren Bewegungsmuster auf die Laufroboter zu übertragen, kamen künstliche neuronale Netze zum Einsatz.
Die Lernfähigkeit der neuronalen Netze führte zu einer Optimierung der Bewegungsmuster. Mit LAURON I gelang 1994 die erfolgreiche Erprobung. In rascher Folge wurden am FZI weitere Laufroboter entwickelt. Der hier ausgestellte LAURON IVc aus dem Jahre 2005 ist mit zahlreichen Sensorsystemen ausgestattet und kann seinen »Kopf« mit den Kameras frei bewegen.

Bild: Deutsches Museum | Eric Alexander Lichtenscheidt

Bild: Deutsches Museum | Eric Alexander Lichtenscheidt
Der Fahrsimulator
Das autonome, als selbständige, Fahren ist eines der meistdiskutierten Themen rund um den Einsatz von künstlicher Intelligenz. Im Idealfall könnten dadurch in der Zukunft Unfälle vermieden und der Verkehrsraum durch weniger Autos platzsparender genutzt werden.
Die technische Umsetzung ist aber alles andere als einfach. Eine Vielzahl von Sensoren muss Situationen richtig erfassen und die KI muss daraus in Bruchteilen von Sekunden die richtigen Entscheidungen fällen. Vollautonomes Fahren ist daher noch eine Zukunftsvision. Der Fahrsimulator im Deutschen Museum Bonn macht die technischen Herausforderungen schon jetzt erlebbar. Für die Besucherinnen und Besucher gilt es zunächst, sich kritischen Situationen im Straßenverkehr selbstlenkend zu stellen. Danach können sie sich zurücklehnen und zusehen, wie gut oder schlecht, die KI die Situationen bewältigt.

Bild: Deutsches Museum | Eric AlexanderLichtenscheidt
Vorsicht, Fußgänger von links
In Echtzeit menschliche Bewegungen zu analysieren, ist für viele KI-Anwendungen eine wichtige Fähigkeit, etwa bei selbstfahrenden Autos: Sie müssen die Körperhaltung von Fußgängern richtig deuten, um Unfälle zu vermeiden. Das KI-System filtert aus den Bildern der Fußgänger die relevanten Informationen zu den Gelenkposition des Skelett heraus. Diese sind die Drehpunkte, von denen aus sich die aktuellen Bewegungen mathematisch beschreiben lassen. So kann die KI voraussehen, ob die Fußgänger in sicherem Abstand bleiben oder gleich die Straße betreten werden. Die Auswertung von Bewegungen in Echtzeit ist aber nicht nur bei selbstfahrenden Autos von Interesse. So lassen sich mit Gesten etwa auch Maschinen steuern.
Exponat: Computer Vision Gruppe, Institut für Informatik, Universität Bonn

Bild: Deutsches Museum | Eric Alexander Lichtenscheidt
Sichere Verkehrsschilder-Erkennung?
Die Erkennung von Verkehrsschildern durch autonom fahrende Autos muss zuverlässig sein. Erkennt das Auto auch manipulierte Schilder? Die Verkehrsschilderkennung erfolgt in autonomen Fahrzeugen durch Kamerasysteme und gut trainierte künstliche neuronale Netzte.
BesucherInnen können hier Lege Vehrkersschild unter die Kamera legen und im grün gekennseichneten Bereich verändern. Was erkennt die KI?
Exponat: Steffen Jendry in Kooperation mit dem Bundesamt für Sicherheit in der Informationstechnik

Bild: Deutsches Museum | Eric Alexander Lichtenscheidt
Puzzeln mit einem Delta-Roboter
Roboter können fest programmierte Bewegungsabläufe zuverlässig reproduzieren. Auch ohne KI, wie in diesem Exponat, können viele Roboteranwendungen zufriedenstellen und zielführend angewandt werden.
BesucherInnen können hier den Deltaroboter zu einem Puzzelwettbewerb herausfordern.
Exponat: igus GmbH